Outils numériques pour l’aide et le contrôle des machines
La thématique Outils numériques pour l’aide à la décision et le contrôle des machines met l’accent sur la réalisation de couches logicielles de haut niveaux au service de la gestion des machines à distances à différentes mailles spatiales (parcelles, exploitations agricoles, grandes distances) intégrant la prise d’information et la gestion des données multi – sources (issues directement de la machine ou encore de réseaux de capteurs complémentaires fixes ou mobiles)
Équipements et infrastructures existants
Des moyens d’investigations originaux structurants existants sont mobilisables.
Au sein de la plateforme
L’AgroTechnoPôle s’appuie sur les moyens déjà développés par ses partenaires – On citera par exemple les travaux conduits par INRAE-TSCF (équipe COPAIN) dans le cadre des technologies IoT, réseaux de capteurs et systèmes d’informations réalisés dans le projet ConnecSens et déployés notamment sur le site expérimental de Montoldre.

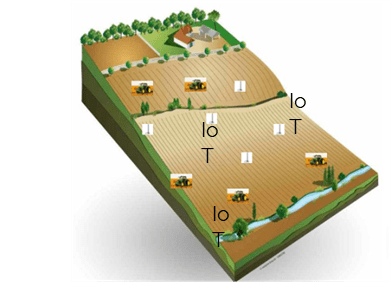
Illustration du Projet ConnecSenS, installé à Montoldre, appliqué à l’étude du fonctionnement hydrique des agrosystèmes
Le projet ConnecSenS a démontré sa capacité à développer des réseaux de capteurs communicants – à faible consommation énergétique au service de l’environnement et de l’agriculture. La gestion des data est réalisé au sein de systèmes d’information (Data Warehouse) flexibles, évolutifs et pouvant être temps réel.
Équipements et infrastructures nouveaux
Nouveaux équipements et infrastructures structurants
Section 3 : Atelier de jumeaux numériques
Les environnements numériques et notamment de jumeaux numériques (exemple Figure XX ) sont des outils maintenant indispensables pour accélérer les nouveaux développements technologiques et numériques.
La plateforme AgroTechnoPôle a choisi de développer et proposer ces outils virtuels dans son offre d’activités de RECHERCHE / INGENIERIE / ESSAIS / FORMATION à destination de ses partenaires externes intéressés.
L’atelier de Jumeaux numériques proposé au service dans un premier temps de la robotique agricole intègre différents sous-ensembles. Le premier sous-ensemble permet de décrire et représenter les modèles du robot en lui-même (caractéristiques dimensionnelles, étages de transmission, actionneurs de direction, …) avec des degrés de représentativité plus ou moins fins à convenir. Un second sous-ensemble s’attache à modéliser les différents capteurs (proprioceptifs ou extéroceptifs) mis en œuvre incluant les modèles d’interactions avec l’environnement, mais également des modèles de perturbations plus ou moins poussés. Des outils d’interfaces conviviaux permettent la mise en place de scénarios reproduisant les situations d’utilisation de la machine. Ce dernier sous-ensemble comprend un modèle numérique de l’espace d’évolution du robot qui dans notre cas, correspondra et reproduira exactement le site expérimental privilégié de l’AgroTechnoPôle de Montoldre (03) avec ses parcelles, ses chemins d’exploitation, ses nouvelles infrastructures extérieures en cours de réalisation, ses bâtiments existants et nouveaux.


Modélisation numérique du site expérimental de la plateforme AgroTechnoPôle de Montoldre (03)
La force de l’offre de l’AgrotechnoPôle résidera notamment sur la disposition et juxtaposition fidèle de ce modèle numérique 3D avec l’environnement physique réel de l’ensemble du site expérimental de Montoldre. Ainsi, une fois les résultats validés en amont dans le monde virtuel, le partenaire retrouvera exactement le même environnement d’évolution dans les phases de développements avals de sa solution. Des interactions entre monde virtuel et monde réel seront bien entendu également possible dans le cadre d’approches HIL « Hardware In the Loop ».
Les développements de cet atelier de jumeaux numériques aujourd’hui défini et qui va entrer prochainement dans sa phase de réalisation avec l’implication d’acteurs spécialisés du domaine constituera un outil virtuel puissant au service par exemple de la réalisation :
- de la conception de nouvelles architectures de robots agricoles et évaluations de leurs comportements dynamiques avant même la réalisation du premier prototype physique, conférant ainsi des avantages notables en termes d’économie de temps et d’argent
- de qualification des performances en termes par exemple de mobilité, de motorisation énergie, de fonctions de sécurité, … des robots et véhicules agricoles préalablement aux campagnes d’essais physiques en grandeur réelle
- de développement et évaluation des Tâches de supervision de haut niveau (coopération de robots homogènes et hétérogènes, liens de communication...) ou tous autres caractérisations concernant le développement de modules basés IA, facilitation de l’apprentissage profond, création de bases de données, maintenance préventive, formation, …
L’atelier de Jumeaux numériques dans un mode d’exploitation permettra de garantir au partenaire industriel toute la confidentialité dans la conduite des développements et exploitation des résultats.
Retranscription du comportement d’un engin mobile en situation évoluant à proximité des bâtiments existants du site expérimental de Montoldre