INNOVATIVE AND SUSTAINABLE METHODS FOR AGRICULTURAL ROBOTICS AND OFF-ROAD MOBILITY
Dans le cadre des activités de l’AgroTechnoPôle, SHERPA-Engineering (Entreprise Innovante de l’ATP) et l’Unité de Recherche TSCF (laboratoire d’INRAE) ont décidé de nouer un partenariat de recherche plus étroit pour le Développement d’Outils et de Méthodes au service du développement de la robotique agricole en créant Laboratoire Partenarial Associé i-SMART (LPA i-SMART).
Le programme consiste à développer des solutions pour concevoir et évaluer des systèmes robotiques agricoles performants qui contribueront à limiter l’empreinte environnementale des pratiques agricoles qui les mobilisent tout en répondant aux exigences de sécurité et aux performances de fonctionnement nécessaires.
Une fois développés, ces outils et méthodes pourront être proposés sous forme de services aux industriels, aux acteurs de la filière et à la communauté scientifique.
Ce projet répond à des attentes de plus en plus fortes des constructeurs de machines agricoles en général et de robots agricoles en particulier : Celles de pouvoir disposer de critères d’évaluation des impacts environnementaux de leurs nouveaux produits non seulement lors de leurs utilisations (ex: impacts des nouvelles motorisations bas-carbone, usages des machines dans un contexte agro écologique) mais aussi lors de leurs écoconceptions en début de cycle de vie (ex: impacts de l’emploi de tels ou tels types de matériaux) ou de recyclage en fin de cycle de vie.
Ce projet constitue l’exemple même de la réelle complémentarité entre INRAE-TSCF et SHERPA-Engineering avec coté INRAE-TSCF une compétence en ACV et outils de description et d’analyse associés ET coté SHERPA-Engineering une capacité de modélisation / représentation fine du fonctionnement des machines à différentes mailles (représentations d’ensembles complets, de sous-ensembles fonctionnels particuliers, de composants spécifiques).
Le couplage de l’ACV et de l’Ingénierie Système offre la possibilité de vraiment proposer une méthode et des outils originaux pour qualifier au plus près une nouvelle machine en absolu, mais aussi en relatif en pouvant la comparer par rapport à des machines existantes.
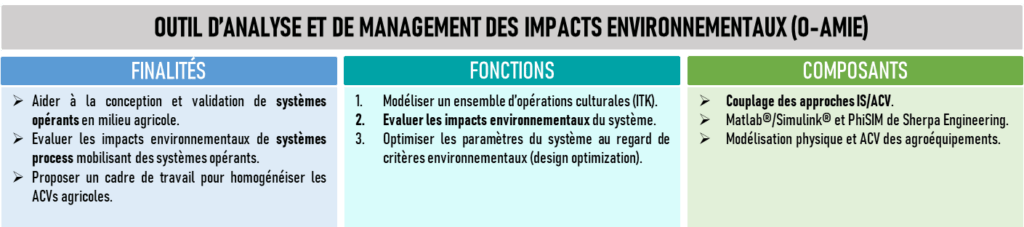
L’outil en cours de développement (O-AMIE) permettra notamment d’évaluer les itinéraires techniques agricoles mobilisant des agroéquipements robotisés en comparaison d’itinéraires conventionnels, qu’ils soient classiques ou agroécologiques.
La sécurité et la performance des robots mobiles agricoles et Off-road sont des préoccupations majeures des acteurs de la filière, du constructeur à l’utilisateur.
Ces protocoles ont été identifiés au niveau international dans le cadre des Groupes de Travail de l’ISO 18-497 et OCDE.
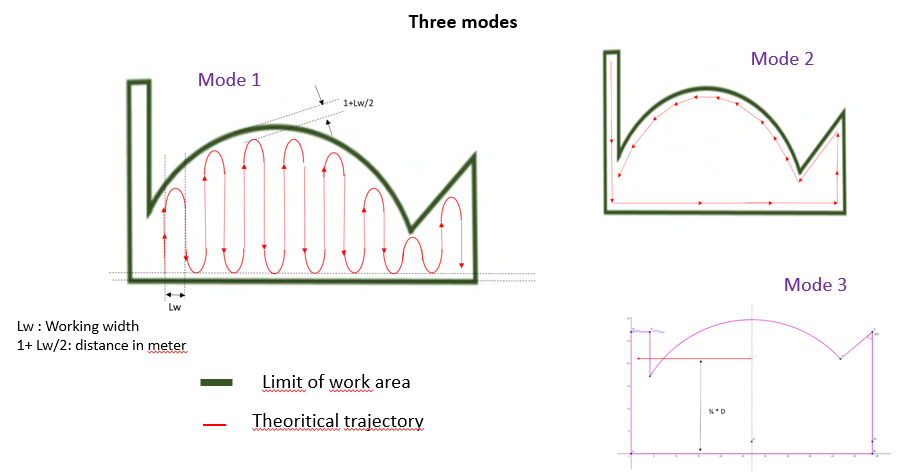
Le dernier protocole ARPA 4 – Tests en environnements agricoles (rangées vignes, arbres, cultures hautes) de detection mannequin sous différentes configurations
élaboré en 2022 et présenté lors journée ODCE résulte des travaux du LPA i-SMART.
Ce projet propose la mise en place d’un atelier de jumeaux numériques dont l’objectif est de pouvoir répondre aux demandes des différents acteurs impliqués dans le développement de robots off road.
L’atelier de jumeaux numériques en cours de construction reposera sur une Offre 1 « Open-source » à destination de la communauté de la Recherche utilisant des logiciels libres (Gazebo, Carla) et sur une Offre 2 reposant sur des logiciels sous licence à destination majoritairement des industriels (constructeurs, équipementiers,…) et dans le respect de la confidentialité vis-à-vis des demandeurs / partenaires extérieurs futurs.
Cet atelier intégrera une modélisation numérique de l’ensemble du site d’expérimentation de Montoldre (zones d’évolution extérieures et intérieures) de l’AgroTechnoPôle , commune aux 2 offres supra.
L’atelier de jumeaux numérique sera capable de répondre aux demandes des différents acteurs impliqués dans le développement de robots off road en s’adaptant à chaque besoin en termes de précision de modélisation ou de niveau de simulation (MIL, SIL, HIL). Il sera basé sur un cœur de simulation dont l’objectif est d’organiser et de synchroniser les différents outils de simulation existants – y compris chez les demandeurs. Des modules descriptifs permettront d’intégrer sous différentes formes les robots/ véhicules et outils associés. Il disposera également d’un ensemble de modélisation de capteurs proprioceptifs et extéroceptifs – y compris pour ces derniers des modèles d’interactions avec l’environnement. Le système comprendra également des outils de gestion de scénarios et d’enregistrement de données qui permettront d’évaluer les performances des robots et autres véhicules dans leurs milieux de travail. Des premiers cas d’usages concrets (ex essais ARPA 4) permettront d’illustrer l’apport et rôle de ces nouveaux outils/ environnements virtuels au service de la conception et évaluation des performances des engins agricoles.
Porteur du projet: Christophe Cariou – Ingénieur de Recherche TSCF
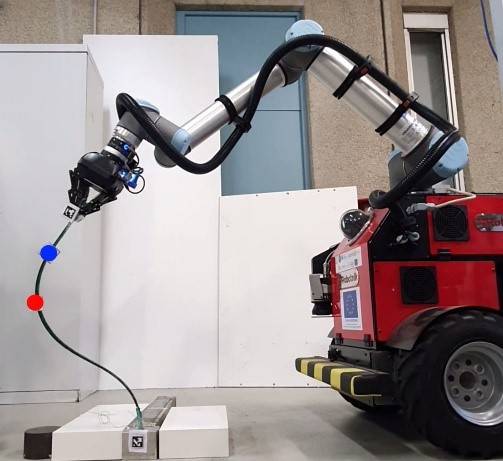
Le projet SynCEA porte sur le couplage dynamique des déplacements de la base mobile d’un robot (déplacement au sol) avec les déplacements de son bras manipulateur embarqué.
Les enjeux applicatifs en relation avec la synchronisation dynamique de la base roulante du robot avec son (ou ses) bras manipulateur(s) en environnements complexes, aléatoires et dynamiques sont à fort potentiels.
Porteurs du projet: Sandro BIMONTE (Directeur de recherche UR TSCF) et Nicolas Tricot -Chargé de Recherche UR TSCF)
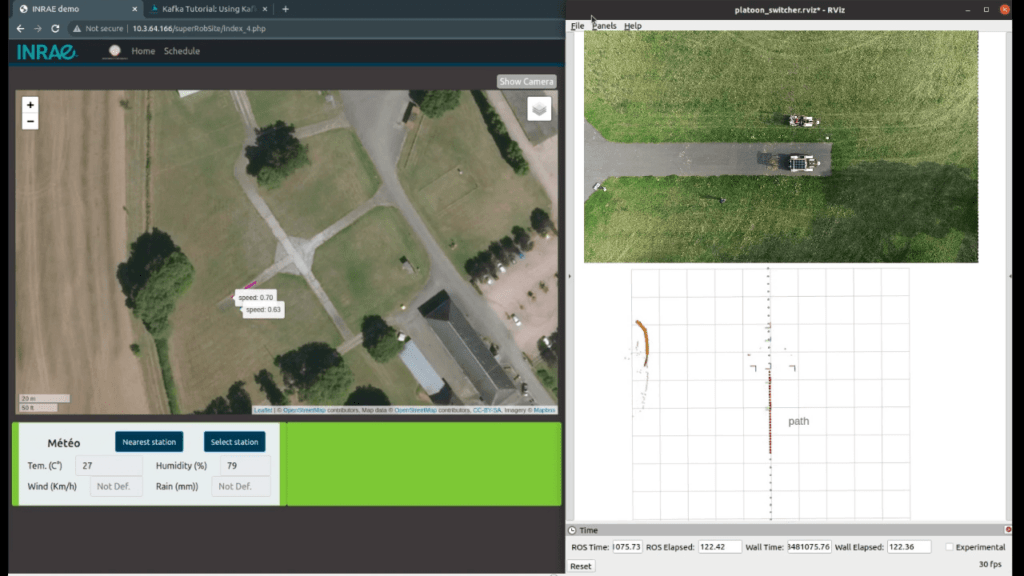
Aujourd’hui les constructeurs de robots agricoles ont bien compris la nécessité de dépasser le robot physique et d’associer à leurs machines différents outils logiciels (pour par exemple cartographier automatiquement les parcelles, collecter de données et enrichir ainsi les bases de connaissances liées aux déplacements du(des) robot(s) et des données liées aux outils associés, assurer le monitoring à distance, etc.).
L’offre robotique se développant pour exécuter des travaux différents tout au cours du cycle de production, les utilisateurs finaux des robots se satisferont de moins à moins à l’avenir des solutions captives (matériels et logiciels issus d’un seul constructeur) qui sont les seules existantes aujourd’hui dans un marché naissant.
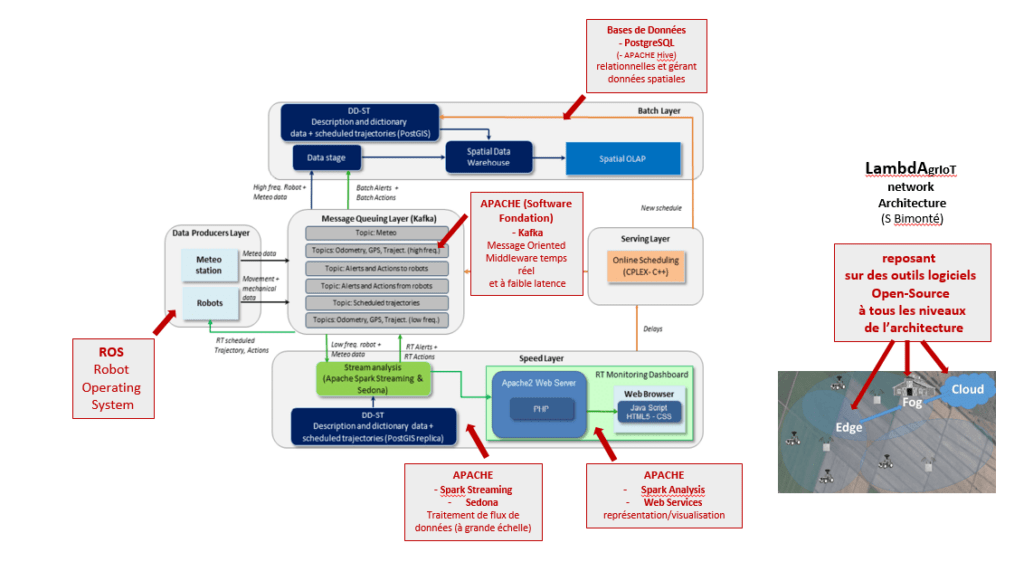
De 2020 à 2022, l’I-SITE CAP20-25 clermontois (porté par l’Université Clermont-Auvergne et associant différents partenaires académiques) a soutenu le projet SupeRob puis SEMCAR impliquant l’Unité de Recherche TSCF d’INRAE, le laboratoire LIMOS de l’UCA ainsi que des partenaires internationaux (Italie, Tunisie). Un premier squelette d’une architecture générique pour le suivi en temps réel des robots autonomes agricoles et d’autres données IoT a été réalisé dénommé LambdAgrioT. Cette architecture est composée de trois couches principales (aux niveaux Edge, fog, Cloud) qui lui permettent d’analyser les données en temps réel, de coordonner les données de différents appareils et véhicules, et de stocker et d’analyser les données historiques. LambdAgrIoT permet ainsi le suivi et le contrôle en temps réel des activités des robots et de leur gestion sous un environnement / systèmes open source. Elle permet d’intégrer tous types de robots et de capteurs dans ce système de gestion/surveillance. Cette architecture Open source représente une première étape vers un système de gestion de données flexible et interopérable pour les robots.
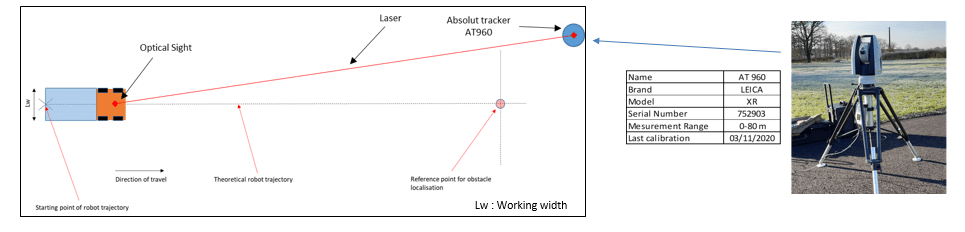
En 2022, INRAE-TSCF et SHERPA-Engineering dans le cadre de leur laboratoire Commun i-SMART ont travaillé à la proposition d’un quatrième protocole.
Cet essai met en œuvre un tracker laser permettant d’obtenir une précision spatiale (X,Y,Z) de 10 micromètres à une fréquence d’acquisition de 1 kHz.
Les systèmes de perception sont placés en statique à l’extrémité d’un tunnel soit sur un support prévu à cet effet, soit directement sur le véhicule. Différents types et natures d’obstacles sont disposés à différentes distances des capteurs à tester.
La plateforme AgroTechnoPôle offre également la possibilité de réaliser des essais de comportement des véhicules et engins agricoles « autonomes ou non » grâce aux différentes zones d’évolution disponibles sur le site expérimental de Montoldre.
(obstacles négatifs et positifs, fixes et mobiles, rangées de végétation artificielles de différents types, …)
(Pistes d’excitation ISO 5008) (ex : mise en défauts de calibration de systèmes de perception, tenue comportements dynamiques …)